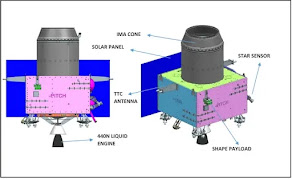
चंद्रयान-3 चंद्रयान-2 का अनुवर्ती मिशन है, जो चंद्र सतह पर सुरक्षित लैंडिंग और रोविंग की एंड-टू-एंड क्षमता प्रदर्शित करता है। इसमें लैंडर और रोवर विन्यास शामिल हैं। इसे एलवीएम3 द्वारा एसडीएससी शार, श्रीहरिकोटा से प्रमोचित किया गया है। प्रणोदन मॉड्यूल 100 किमी चंद्र कक्षा तक लैंडर और रोवर विन्यास को ले जाएगा। प्रणोदन मॉड्यूल में चंद्र कक्षा से पृथ्वी के वर्णक्रमीय और ध्रुवीय मीट्रिक मापों का अध्ययन करने के लिए स्पेक्ट्रो-पोलरिमेट्री ऑफ हैबिटेबल प्लैनेट अर्थ (एसएचएपीई) नीतभार है।

लैंडर नीतभार: तापीय चालकता और तापमान को मापने के लिए चंद्र सतह तापभौतिकीय प्रयोग (चेस्ट); लैंडिंग साइट के आसपास भूकंपीयता को मापने के लिए चंद्र भूकंपीय गतिविधि (आईएलएसए) के लिए साधनभूत; प्लाज्मा घनत्व और इसकी विविधताओं का अनुमान लगाने के लिए लैंगमुइर जांच (एलपी)। नासा से एक निष्क्रिय लेजर रिट्रोरिफ्लेक्टर ऐरे को चंद्र लेजर रेंजिंग अध्ययनों के लिए समायोजित किया गया है।
रोवर नीतभार: लैंडिंग साइट के आसपास मौलिक संरचना प्राप्त करने के लिए अल्फा कण एक्स-रे स्पेक्ट्रोमीटर (एपीएक्सएस) और लेजर प्रेरित ब्रेकडाउन स्पेक्ट्रोस्कोप (एलआईबीएस)।
चंद्रयान-3 में एक स्वदेशी लैंडर मॉड्यूल (एलएम), प्रोपल्शन मॉड्यूल (पीएम) और एक रोवर शामिल है, जिसका उद्देश्य अंतरग्रहीय मिशनों के लिए आवश्यक नई तकनीकों को विकसित और प्रदर्शित करना है। लैंडर के पास निर्दिष्ट चंद्र स्थल पर सॉफ्ट लैंड करने और रोवर को तैनात करने की क्षमता होगी जो इसकी गतिशीलता के दौरान चंद्र सतह के इन-सीटू रासायनिक विश्लेषण करेगा। लैंडर और रोवर के पास चंद्र सतह पर प्रयोग करने के लिए वैज्ञानिक नीतभार हैं। पीएम का मुख्य कार्य एलएम को लॉन्च व्हीकल इंजेक्शन से अंतिम चंद्र 100 किमी गोलाकार ध्रुवीय कक्षा तक ले जाना और एलएम को पीएम से अलग करना है। इसके अलावा, प्रणोदन मॉड्यूल में मूल्यवर्धन के रूप में एक वैज्ञानिक नीतभार भी है जिसे लैंडर मॉड्यूल के अलग होने के बाद संचालित किया जाएगा। चंद्रयान-3 के लिए चिन्हित किया गया लॉन्चर एलवीएम3 एम4 है जो एकीकृत मॉड्यूल को ~170x36500 किमी आकार के एलिप्टिक पार्किंग ऑर्बिट (ईपीओ) में स्थापित करेगा।
चंद्रयान-3 के मिशन के उद्देश्य हैं:
- चंद्र सतह पर सुरक्षित और सॉफ्ट लैंडिंग प्रदर्शित करना
- रोवर को चंद्रमा पर भ्रमण का प्रदर्शन करना और
- यथास्थित वैज्ञानिक प्रयोग करना
मिशन के उद्देश्यों को प्राप्त करने के लिए लैंडर में कई उन्नत प्रौद्योगिकियां मौजूद हैं जैसे,
- अल्टीमीटर: लेजर और आरएफ आधारित अल्टीमीटर
- वेलोसीमीटर : लेजर डॉपलर वेलोसीमीटर और लैंडर हॉरिजॉन्टल वेलोसिटी कैमरा
- जड़त्वीय मापन: लेजर गायरो आधारित जड़त्वीय संदर्भ और एक्सेलेरोमीटर पैकेज
- प्रणोदन प्रणाली: 800N थ्रॉटलेबल लिक्विड इंजन, 58N एटिट्यूड थ्रस्टर्स और थ्रॉटलेबल इंजन कंट्रोल इलेक्ट्रॉनिक्स
- नौवहन, गाइडेंस एंड कंट्रोल (NGC): पावर्ड डिसेंट ट्रैजेक्टरी डिजाइन और सहयोगी सॉफ्टवेयर तत्व
- खतरे का पता लगाना और बचाव : लैंडर खतरे का पता लगाना और बचाव कैमरा और प्रसंस्करण एल्गोरिथम
- लैंडिंग लेग तंत्र
उपर्युक्त उन्नत तकनीकों को पृथ्वी की स्थिति में प्रदर्शित करने के लिए, कई लैंडर विशेष परीक्षणों की योजना बनाई गई है और सफलतापूर्वक संपन्न किए गए हैं।
- एकीकृत शीत परीक्षण - परीक्षण प्लेटफॉर्म के रूप में हेलीकॉप्टर का उपयोग करके एकीकृत संवेदक और नौवहन प्रदर्शन परीक्षण का प्रदर्शन
- एकीकृत हॉट परीक्षण - टॉवर क्रेन का परीक्षण प्लेटफॉर्म के रूप में उपयोग करके संवेदक, एक्चुएटर्स और एनजीसी के साथ बंद लूप प्रदर्शन परीक्षण का प्रदर्शन
- लैंडर लेग मैकेनिज्म परफॉरमेंस परीक्षण एक लूनर सिमुलेंट परीक्षण बेड पर विभिन्न टच डाउन स्थितियों का अनुकरण करता है।
चंद्रयान -3 के लिए समग्र विनिर्देश नीचे दिए गए हैं:
| क्रम संख्या | प्राचल | विशेष विवरण |
| 1. | मिशन लाइफ (लैंडर और रोवर) | एक चंद्र दिवस (~14 पृथ्वी दिवस) |
| 2. | लैंडिंग साइट (प्राइम) | 4 किमी x 2.4 किमी 69.367621 द., 32.348126 पू. |
| 3. | विज्ञान नीतभार | लैंडर:- मून बाउंड हाइपरसेंसिटिव आयनोस्फीयर और एटमॉस्फियर (रंभा) की रेडियो एनाटॉमी
- चंद्र का सरफेस थर्मो फिजिकल एक्सपेरिमेंट (चेस्ट)
- चंद्र भूकंपीय गतिविधि के लिए उपकरण (ILSA)
- लेजर रेट्रोरिफ्लेक्टर ऐरे (एलआरए) रोवर:
- अल्फा कण एक्स-रे स्पेक्ट्रोमीटर (एपीएक्सएस)
- लेजर प्रेरित ब्रेकडाउन स्पेक्ट्रोस्कोप (एलआईबीएस) प्रणोदन मॉड्यूल:
- निवासयोग्यग्रह पृथ्वी (शेप) की स्पेक्ट्रो-ध्रुवीयमिति
|
4.
| दो मॉड्यूल विन्यास | - प्रणोदन मॉड्यूल (लैंडर को प्रमोचन प्रवेशन से चंद्र कक्षा तक ले जाता है)
- लैंडर मॉड्यूल (रोवर को लैंडर के अंदर समायोजित किया गया है)
|
| 5. | द्रव्यमान | - प्रणोदन मॉड्यूल: 2148 किग्रा
- लैंडर मॉड्यूल: 26 किलो के रोवर सहित 1752 किलो
- कुल: 3900 किग्रा
|
| 6. | विद्युत उत्पादन | - प्रणोदन मॉड्यूल: 758 W
- लैंडर मॉड्यूल: 738W, डब्ल्यूएस बायस के साथ
- रोवर: 50W
|
| 7. | संचार | - प्रणोदन मॉड्यूल: आईडीएसएन के साथ संचार करता है
- लैंडर मॉड्यूल: आईडीएसएन और रोवर के साथ संचार करता है। आकस्मिक लिंक के लिए चंद्रयान -2 कक्षित्र की भी योजना है।
- रोवर: लैंडर के साथ ही संचार करता है।
|
| 8. | लैंडर संवेदक | - लेजर जड़त्वीय संदर्भ और त्वरणमापी पैकेज (एलआईआरएपी)
- केए-बैंड अल्टीमीटर (कारा)
- लैंडर पोजीशन डिटेक्शन कैमरा (एलपीडीसी)
- एलएचडीएसी (लैंडर हैज़र्ड डिटेक्शन एंड अवॉइडेंस कैमरा)
- लेजर अल्टीमीटर (एलएएसए)
- लेजर डॉप्लर वेलोसीमीटर (एलडीवी)
- लैंडर क्षैतिज वेग कैमरा (एलएचवीसी)
- माइक्रो स्टार संवेदक
- इनक्लिनोमीटर और टचडाउन संवेदक
|
| 9. | लैंडर एक्ट्यूएटर्स | प्रतिक्रिया व्हील - 4 नग (10 एनएम और 0.1 एनएम) |
| 10. | लैंडर प्रणोदन प्रणाली | द्वि-प्रणोदक प्रणोदन प्रणाली (एमएमएच + एमओएन3), 4 नग, 800 एन थ्रॉटलेबल इंजन और 8 नग. 58 एन; थ्रॉटलेबल इंजन कंट्रोल इलेक्ट्रॉनिक्स |
| 11. | लैंडर तंत्र | - लैंडर लेग
- रोवर रैंप (प्राथमिक और द्वितीयक)
- रोवर
- आईएलएसए, रंभा और चैस्ट नीतभार
- गर्भनाल संबंधक संरक्षण तंत्र,
- एक्स-बैंड एंटीना
|
| 12. | लैंडर सतहस्पर्श विनिर्देश | - लंबवत वेग: ≤ 2 मीटर / सेकंड
- क्षैतिज वेग: ≤ 0.5 मीटर / सेकंड
- ढलान: ≤ 12 deg
|
चंद्रयान-3 लैंडर मॉड्यूल और रोवर पर नियोजित वैज्ञानिक नीतभार के उद्देश्य नीचे दिए गए हैं:
चंद्रयान-3 मॉड्यूल के तीन आयामी झलक नीचे दी गईं हैं: 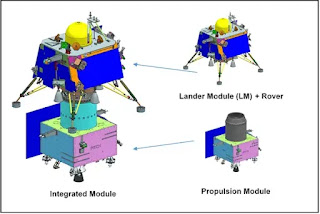 | | चंद्रयान -3 – तत्त्व |
|  | | चंद्रयान -3 - एकीकृत मॉड्यूल |
|
 | | चंद्रयान -3 एकीकृत मॉड्यूल – दृश्य |
|  | | चंद्रयान-3 लैंडर मॉड्यूल –दृश्य |
|
 | | चंद्रयान-3 प्रणोदन मॉड्यूल – दृश्य |
|  | | रैंप पर चंद्रयान -3 रोवर और तैनात दृश्य |
|
 | | चंद्रयान -3 रोवर –दृश्य |
|  | | चंद्रयान-3 लैंडर |
|
 | | चंद्रयान-3 लैंडर |
|  | | चंद्रयान -3 प्रणोदन मॉड्यूल |
|
 | | चंद्रयान-3 रोवर |
|
 | | चंद्रयान-3 - मिशन प्रोफाइल |
|
आशा है की यह आर्टिकल आपको पसंद आया होगा।
अगर इस आर्टिकल में कुछ गलत है या फिर कुछ छूट गया है या फिर अच्छा हो तो हमें कॉमेंट सेक्शन में बताएं।
ऐसे ही और मजेदार आर्टिकल के लिए
मिलते हैं अगले आर्टिकल में
तब तक के लिए जय हिंद!
























0 Comments